Advanced Manufacturing
R. Fierro, L. Tapia
Research Objectives
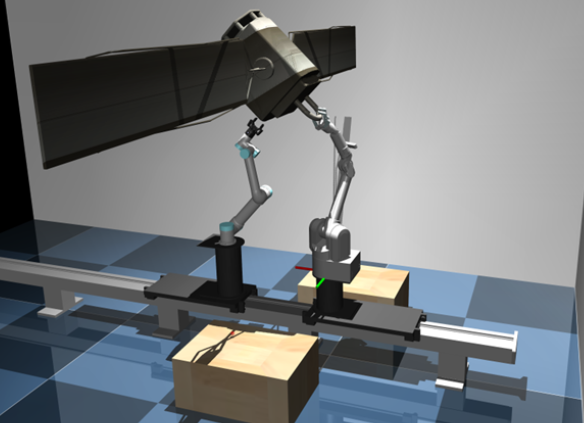
- Co-bots for assembly (human-robot interactions; WAMS on track; gantries)
- Navigation-based compliance control (stiffness based on speed, proximity, collision likelihood)
- Agile manufacturing, low-volume
- ROS controllers (need real time control) installed
- Consider efficient mathematical methods, AI, parts locations, integration, DNN