Home
About
Research
SURI
People
Contact
Search
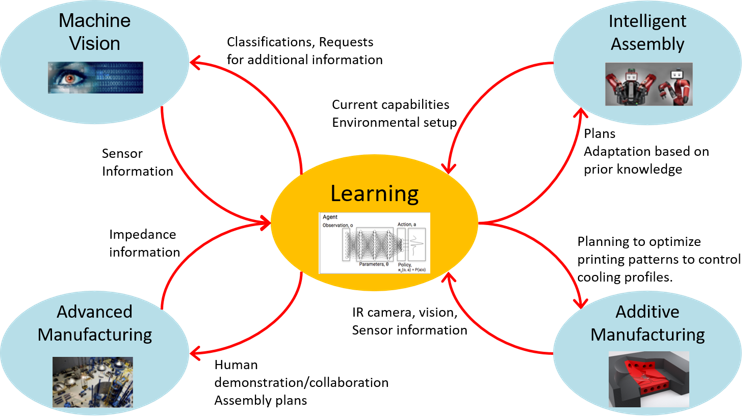
Learning and Motion Planning
L. Tapia, M. Oishi
Research Objective
Transfer of learned knowledge
Study of convergence and stability
Guarantees after transfer